Azimuth Controller
This azimuth control unit gives tugboat captains more directional feedback and better ergonomics when operating their vessels. Its main goal is to provide the captains with a better understanding of where the azimuth thruster is pointing and how much throttle input is being given. This key functionality is balanced with a major focus on the ergonomics and ease of use of the control unit.
Project Type : Individual Project
Contribution: I participated at every step of the design process as it was my final bachelor project which I did for Smart-Ship B.V.
Date: Feb/2021 – July/2021


Context Exploration
The Through primary and secondary research the exact issues with current Azimuth control units were evaluated. Interviews, questionnaires, first-hand experience and a market evaluation were conducted to gather data.
This led to the understanding that the main issues regarding current control units lie in unclear directionality and bad ergonomics.
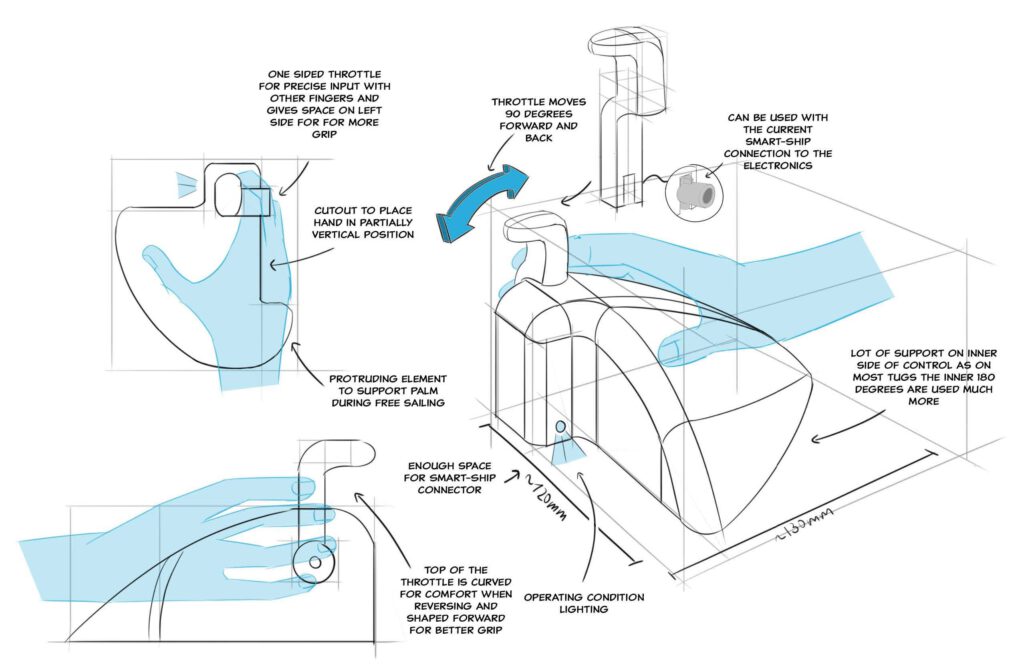
Initial Ideation
Using the insights gathered from research, a multitude of ideas were created and then evaluated using the Four-Box method. The most promising ideas were then improved upon, after which they were again evaluated using the PMI method.
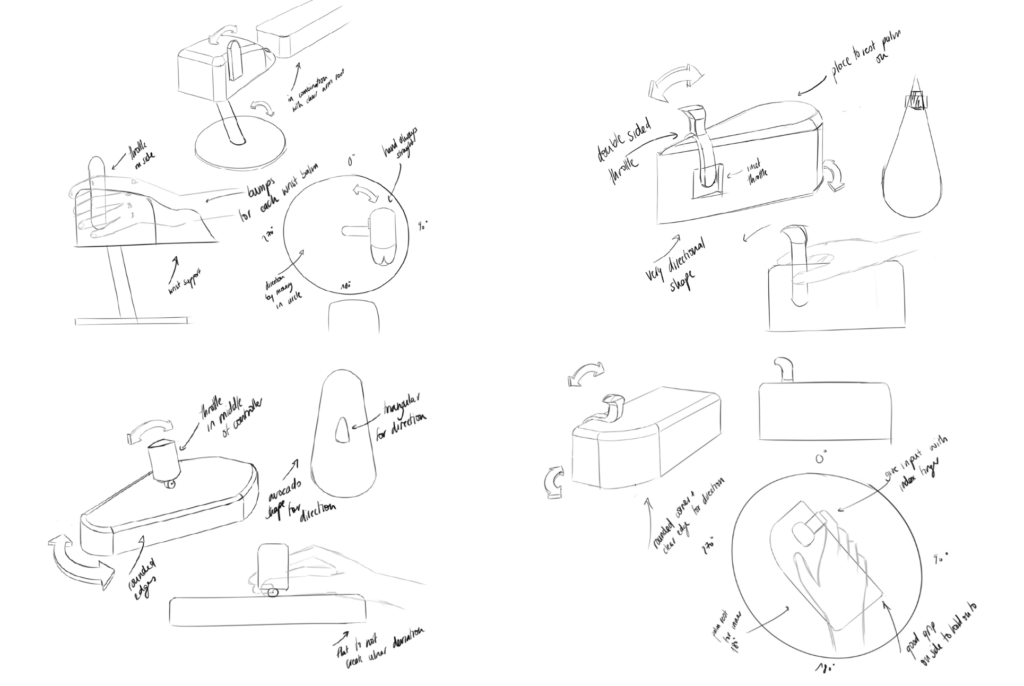
2nd Iteration
From the PMI method, some ideas were chosen or combined resulting in 8 promising concepts, which were subsequently worked out further. On the left, four examples of these ideas can be seen.
Each concept aims to solve the problem differently, however, all of them meet the design requirements created earlier in the design process.
To find the best three ideas, these eight concepts were then evaluated according to these requirements using the Weighted Objectives method.
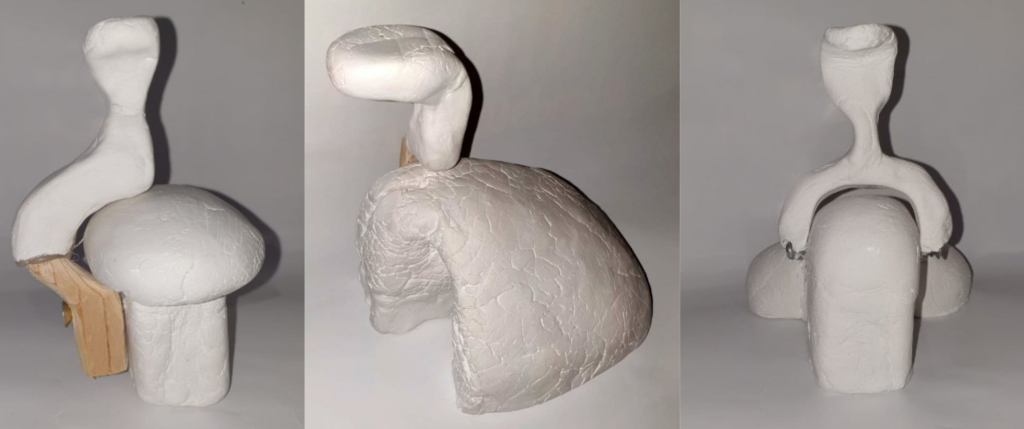
Clay Prototyping & Testing
I decided to use modelling clay to create the prototypes of the winning ideas. These allow for a more realistic feel over hard foam and could be handled with less care during the testing with the target group. The clay was supported by wood and wire which made it possible to replicate the feel of ‘functioning’ throttle levers.
The testing focused on the shape of the prototypes to understand which one had the ideal size, was the most functional one and which provided the most comfort and wrist support.




Prototyping & Testing of Style Concepts
After making a concluding design for the general form of the controller, I decided to focus my attention on its aesthetics. I created four ‘style concepts’ of which the bodies were made from hard foam, and the throttle levers were 3D printed.
These concepts were then tested as their form differed. Changing the aesthetics also had an impact on the form, and therefore it was important whether some aesthetic design choices changed their usability.
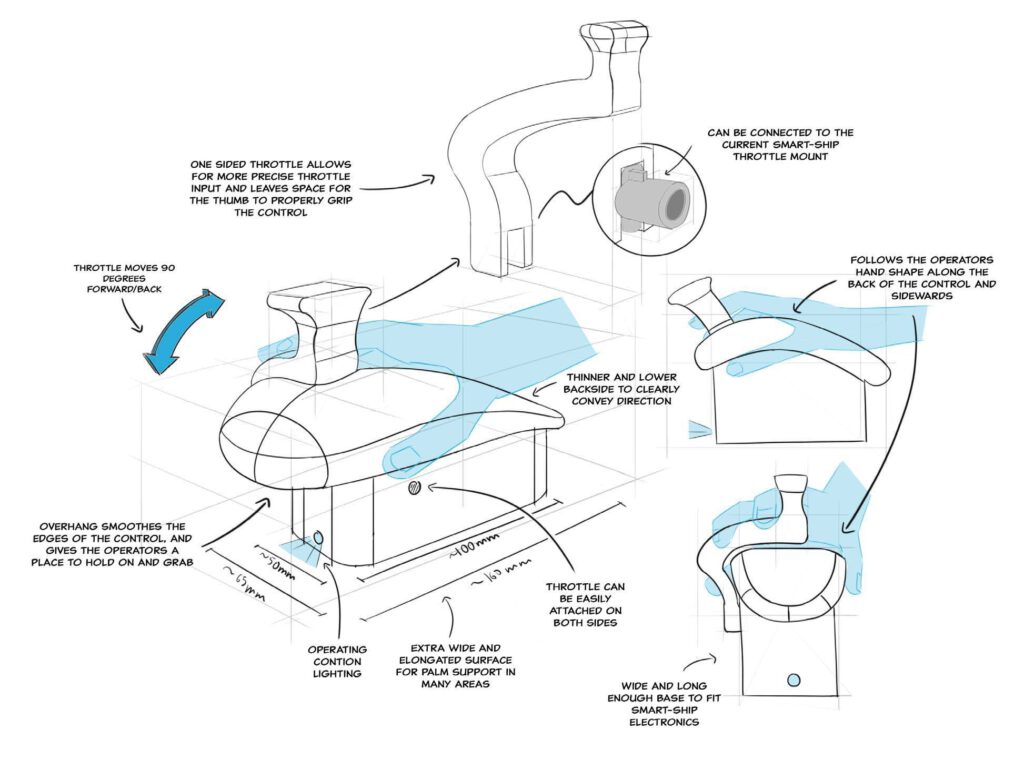
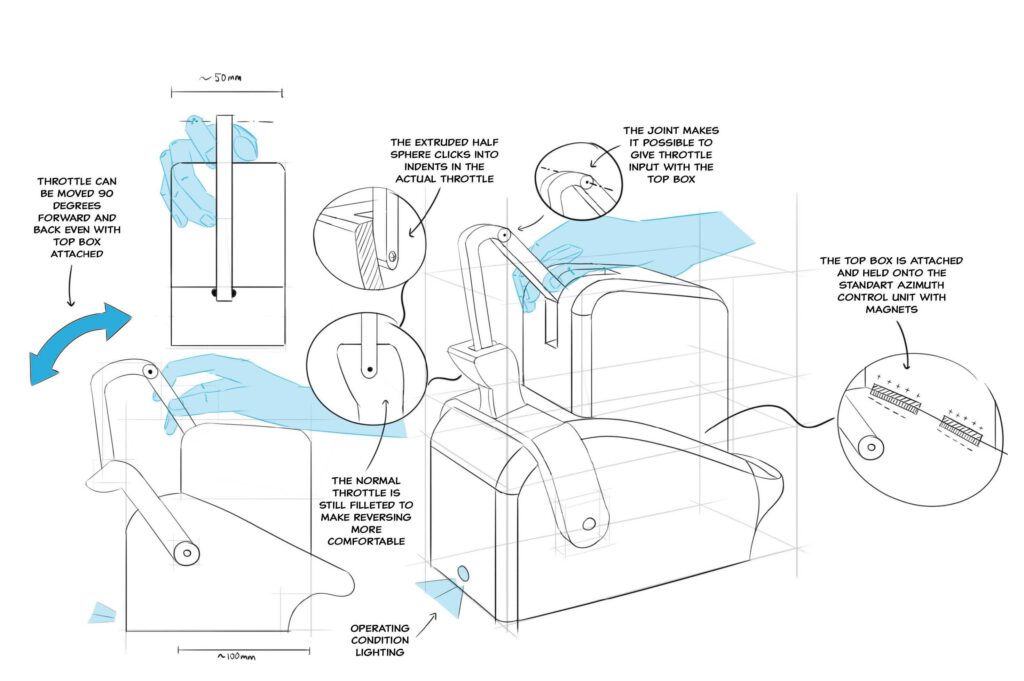
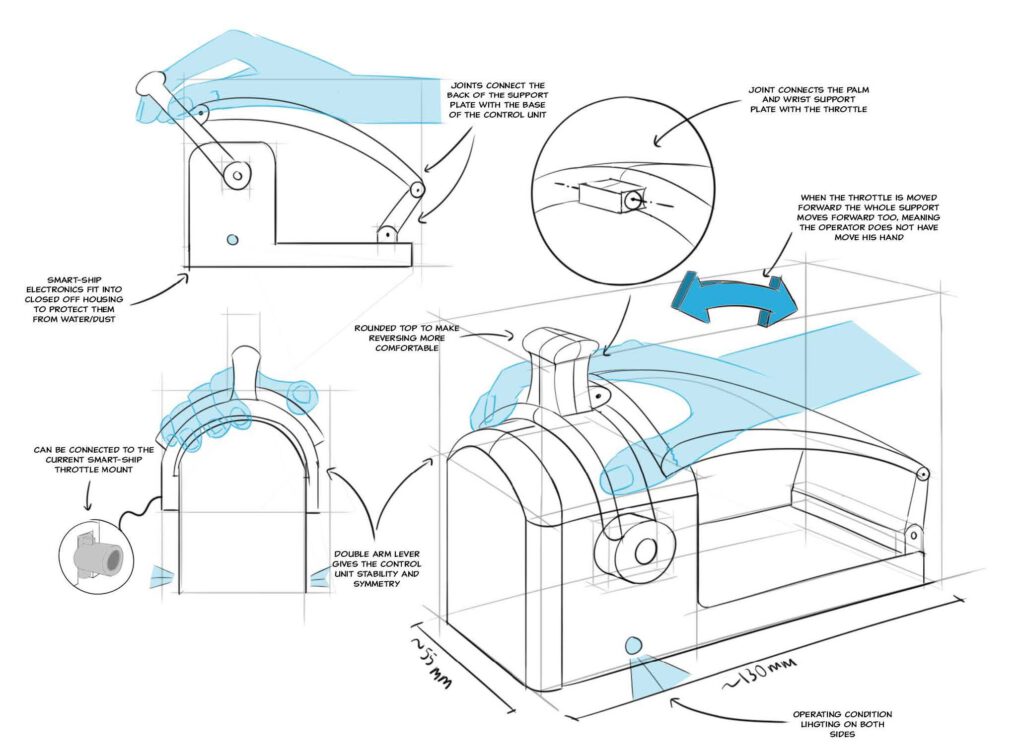
Final Concept
The final concept is an azimuth control unit for tugboats, which is focused on making operating it more comfortable
and safer. With this control unit, tugboat operators can operate comfortably for longer periods of time, and by having a
very directional design, they will always know where the control unit is pointing to.
The final prototype was resin printed and as it was designed to perfectly integrate into the Smart-Ship hardware, it could be mounted onto their simulators.



To read more about my final bachelor project you can find the entire Design report here: